Skerry Technologies
![]()
Putting the Science in Mad Science
Welcome to Skerry Technologies, my (currently one-man, completely unfunded, almost might as well consider it a hobby) Research and Development operation focused on small Unmanned Aerial Systems.
Although, in all honesty, it more like “mad engineering” rather than mad science: its all about trying to understand how to extend the state of the art in small autonomous drones.
Project Kestrel
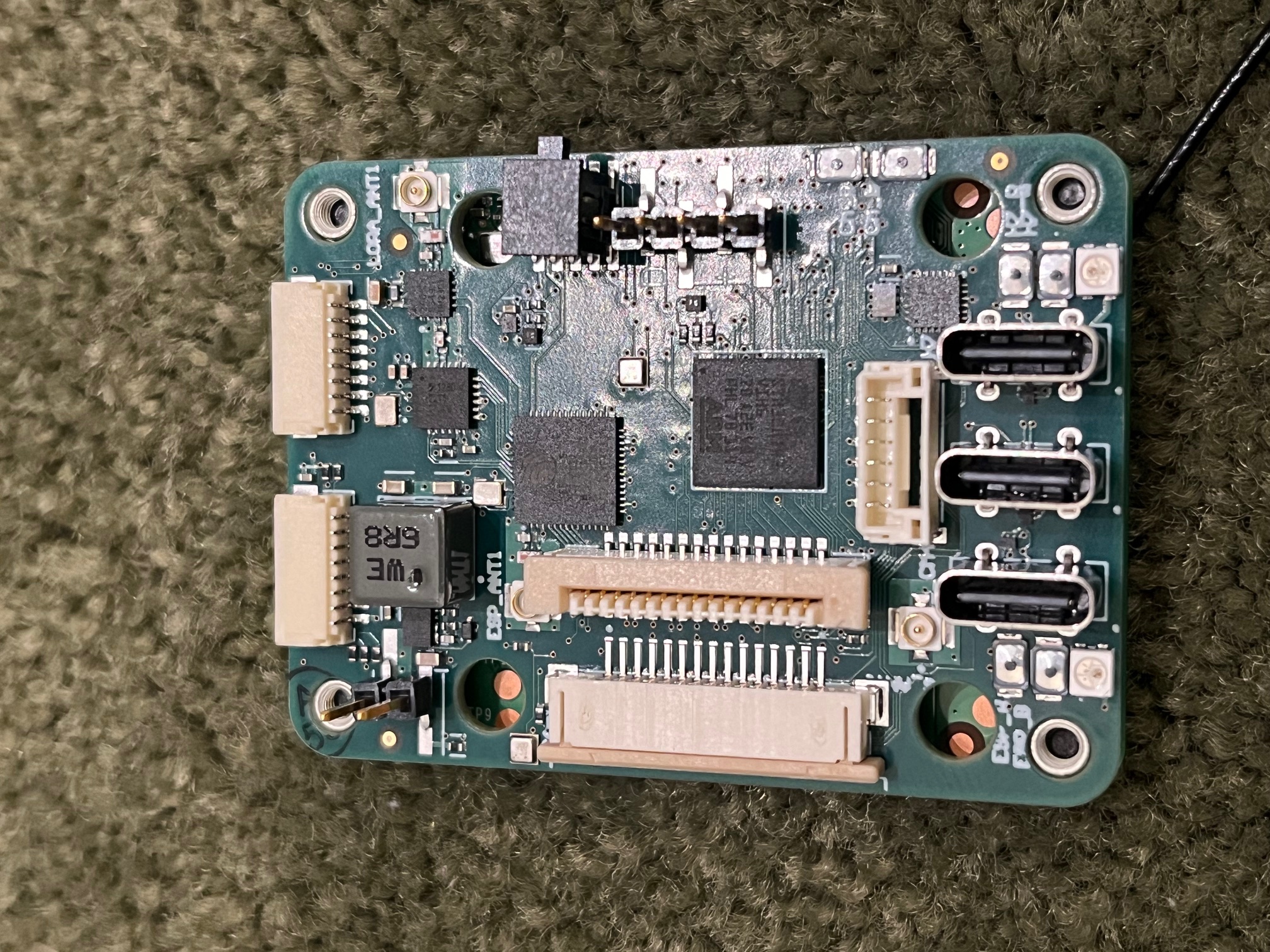
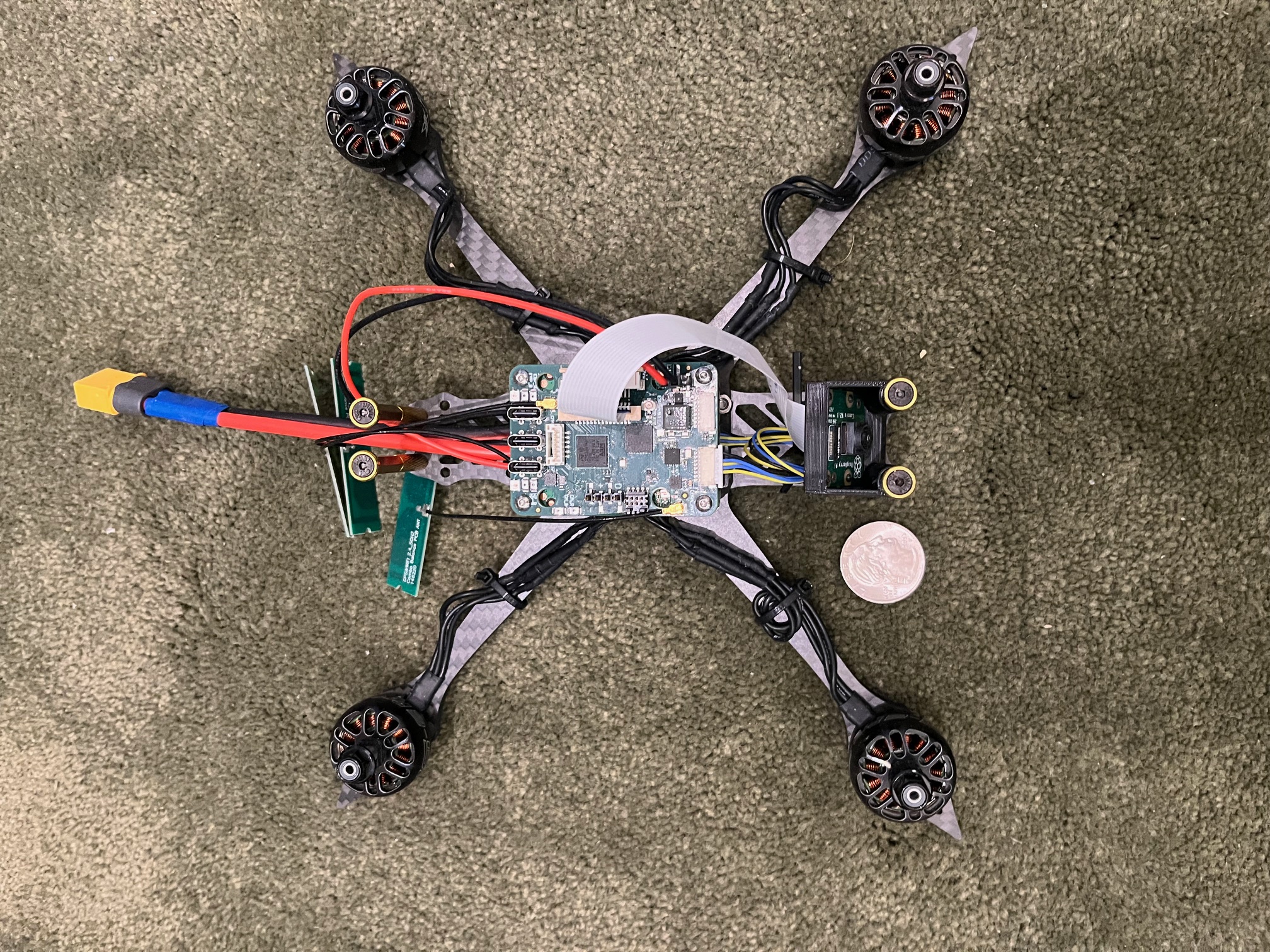
The Kestrel design is a small, highly integrated autopilot design for small drones which couples a Raspberry Pi compute module to an ardupilot-compatable autopilot board that includes two MIPI CSI2 camera interfaces, a GPS, an IMU, power distribution, and a separate chip for a LoRa datalink.
The major idea is that by coupling a Raspberry Pi compute module into a small drone it should be possible to build small, vision based autonomy in a very low-cost package. The RP4 compute module has just enough compute to do a reasonable amount of vision processing and, by coupling it to an independent autopilot, offload all the true real-time processing to a dedicated coprocessor.
Current Status
A previous version of this board has already flown under remote control using Ardupilot as the on-board autopilot and successfully recorded video in flight showing the cameras and compute module as fully operational.
The current board is still undergoing partial validation: the power supply, CM4, cameras, and GPS are all verified as working. Physical integration into a small quadcopter chassis was also successfully performed.
Hardware ToDo List
- Port Ardupilot to the current board and fly under remote control.
- Port ExpressLRS to the ESP32 datalink chip.
- Implement RemoteID on the ESP32 datalink chip.
- Consider a revised design to fix identified bugs, switch to a more advanced IMU chip, support for the CM5 compute module, better internal programming paths, and other changes.
Software ToDo List
- Lots
Overall, the software stack beyond using existing components exists as a paper design with effectively no coding. The primary focus would be on “old-school” machine vision rather than anything “AI based”. This is both to improve performance (most ML-based image processing is expensive) and to provide much stronger explainability.
I’ve previously had a few students experiment with portions of the pipeline and it is clear that the Raspberry Pi CM4 has sufficient compute for a few frames-per-second vision processing with a 1080p camera.
Low altitude operation: Very low altitude (under 50m altitude) is focused primarily on collision avoidance. The primary pipeline in this mode focuses on optical flow, a traditional machine vision technique to recreate a 3D environment from a moving camera.
Aerial target recognition: Optial flow is also used to drive target identification and recognition. For aerial targets (such as applications like counter-drone or bird abatement), optical flow is used to isolate items in space. Only such items are passed to machine-learning based target recognition.
Attention-based scanning: In higher altitude operations the software will take advantage of high resolution cameras with digital pan/tilt/zoom. Normally the software will use the entire field of view at low resolution (1080p/30fps), but if any region appears interesting, it will perform a digital zoom to isolate the area of interest for applying ML target recognition.
Project Sparrowhawk
Project Sparrowhawk is in initial planning, looking at developing clean-sheet software for a low level drone autopilot that takes advantage of modern, multicore microprocessors and the far more robust Rust programming language.
The two primary current open-source autopilot stacks are Ardupilot and Betaflight. Ardupilot is a large open-source project written in older (circa 2010) C++, while Betaflight (a fork of Cleanflight) is a stripped down design targeting quadcapters written in C. Also, although highly integrated in some aspects, neither are designed to integrate communication, FAA-mandated DroneID, or to take advantage of modern multicore embedded processors.
The overall objectives are:
- Develop a small, low cost referennce hardware design
- Develop a new software stack for the hardware
- Evaluate Rust’s applicability for the embedded environment
- Provide a platform for an integrated systems textbook
- Meet BlueUAS framework requirements for government use
Intended Hardware Archictecture
The intended autopilot architecture will be a single-sided board with a 30.5x30.5 mounting form factor with JST connectors. The board will also have castillated connections allowing it to be integrated into larger designs as well.
- CPU: Raspberry Pi RP2350 in the QFN-80 package
- IMU: TDK 42688
- Compass: Memsic MMC5983MA
- Barometer: 2x Bosch BMP 390, one with a mounting point to connect to a pitot tube
- GPS: UBlox MIA-M10-Q with an external antenna connector
- WiFi: Espressif ESP32C3 with a separate connection to the GPS
- LoRa: Semtec, either the LR2021 or SX1280 with an external power amplifier
- Power: Unreglated LiPo to 5V buck converter
- Power: 5V to 3.3V LDO
The intended design is small enough that it can be constructed as a 4-layer board and assembled in-house on an existing small pick & place machine. It should also be able to trivially meet BlueUAS component criteria allowing it to be used in US government applications.
Why Rust?
The use of C and older C++ produces code is inherently unsafe: unable to be effectively analyzed for correctness and likely rife with memory errors. At the same time the hard real-time constraints involved in operating a drone (a 4-8 kHz update loop that polls the IMU, filters the noise, and updates the operating state of the motors and actuators) prohibit the use of any language without C or C++’s garbage-collector free memory semantics or emphasis on zero-overhead abstractions.
Thus the only languages that can be safely used to engineer the core of an autopilot are agressively modern C++ (no raw pointers, collections with checking assertions enabled, etc) or Rust. Since either language choice require effectively either a complete rewrite of an existing codebase or a clean-sheet design the choice of Rust seems reasonable.
Using Rust will not only gain the inherent safety advantages that are built into the language from the start (Rust’s design philosophy is similar to C++ in a focus on zero-overhead abstractions but not at the cost of safety, unlike modern C++ which can only be safe with explicit programmer discipline), but will also serve as an experiment, allowing an evaluation of Rust in practice.
Why multicore?
The Raspberry Pi microcontrollers as well as the ESP32 line from Espressif have introduced symmetric multicore designs into the microcontroller space. These families of microcontrollers not only offer a significantly lower price point than competing designs from ST Microsystems but far more flexible I/O structures, allowing one or two packages to cover most uses.
The new RP2350 in particular is an excellent part. Full system BOM cost is less than $3 and it contains a dual core ARM Cortex-M33 at 150MHz with floating point and 30 or 48 highly flexible general purpose I/O pins. It also ships with modern code signing and security features.
The software would probably be written as a “bare metal” application which does not rely on an embedded real-time OS. However the use of a multicore architecture enables segregation: the critical real-time control loop will run on the second processor while all the other tasks, including the interrupt handler, run on the first processor.
Internal Notes
Recently when I’ve been teaching undergraduate programming I’ve made my internal notes for assignments public. I think this is a good practice so for this project I am doing it as well. My internal notes page is here.
Dr Nicholas Weaver

I obtained his Ph.D. from the University of California at Berkeley in 2003. My primary research focus is on digital, explainable, and commonly adversarial systems.
Within that, however, is a huge range of topics. Down at the lowest level i’ve designed my own custom boards and an FPGA architecture, while the high level has ranged up to sophisticated network measurement techniques and economic disruption of nefarious actors.
When it comes to UAS systems my primary focus is on hardware/software co-design to enable autonomous operation. I’ve developed an autopilot that can mate a Raspberry Pi compute module to an ardupilot-based autopilot as a proof of concept and I am now working on developing my own from-scratch autopilot based on co-designed software and hardware.
My CV is available here and my nontechnical writing is mostly published at Lawfare Media